腾讯发布四足机器人Max二代梅花桩上完成跳跃、空翻
2022-08-08 13:59来源:东方财富
日前,腾讯正式发布Max II机器人记者获悉,Max可以完成旋转踏步,单桩跳跃,双轮站梅花桩等高难度动作同时,过桩速度是贾莫卡的4倍
依托机器人视觉定位,地形识别,全方位六自由度运动规划,高精度模型预测控制等技术,Max可以精准识别复杂地形,根据地形实时想到步骤,规避踩踏,滑倒,跌倒等风险通过设置梅花桩复杂地形场景,精准落地跳跃等条件,成功验证了Max对复杂地形的适应性
根据消息显示,Max是腾讯机器人X实验室研发的多模态四足机器人采用腿轮一体的独创车身设计,实现崎岖路走稳,平坦路跑快与第一代相比,Max在视觉感知,轨迹规划,运动控制等方面实现了技术创新,标志着腾讯在机器人灵敏动作研究上取得了新的突破
马克斯展示了他敏感的运动能力,完成了空翻和其他高难度动作,如打桩。
在腾讯机器人X实验室为Max设置的测试场景中,Max需要快速穿过一排总长10米,高0.8米的梅花桩为了成功穿越这片复杂的地形,马克斯面临着许多挑战首先,Max需要实时的地形识别和测绘,以应对密集细杆梅花堆轻微晃动的复杂地形Max看完地形后,需要根据地形规划合适的运动轨迹,自动调整俯仰,侧身和转向,以适应起伏的地形
在官方发布的视频中,Max在极端地形下表现出了出色的运动控制能力他能够准确感知自己和梅花桩的位置,找到桩面中心,连贯移动,准确落地他完成了快走,踏步旋转,单桩跳跃,双轮站立等一系列动作在狭窄的绒面上从结果来看,在持续高频冲击的情况下,Max定位精度的累积误差小于1%,地形识别精度小于2cm
为了更好地保证Max力控制的精度,腾讯机器人X实验室在机器人机动性和机身设计上进行了改进Max具有触地检测能力,可以准确判断脚的触地状态,规划质心轨迹,控制柔顺力,避免身体大幅度振动和触地后脚的反弹,保证落地平稳,动作流畅同时,Max的机身本体在2021版本的基础上,完成了大量的结构和电气系统的优化,可以应对跑,跳,翻等高动态动作带来的持续强烈冲击,从而保证了机身的稳定性和可靠性
除了移动性能的提升,Max在运动效率上也有显著提升Max在完成跳跃,空翻等高难度动作时,可以规划出最省力的运动轨迹,即如何使所需驱动力最小化具体来说,Max可以根据目标跳跃距离,跳跃高度,关节力矩极限等条件计算出最优跳跃轨迹,兼容四足跳跃和双腿跳跃
自研的模型算法和深度强化学习,让Max的动作更加敏捷。
腾讯机器人X实验室成立于2018年,致力于推动人机协作的下一代机器人研究,打造从虚拟世界到现实世界的载体和连接器目前,实验室的研究方向包括作为机器人基础技术的感知能力,以及灵敏运动,灵巧操纵和智能体三大支柱技术,致力于智能协作机器人
根据官方介绍,Max独创地将机器人腿和轮式运动模式结合起来,从硬件的机械和电路设计,到软件的系统框架和控制算法的创新,使得Max在崎岖道路上走得稳,在平坦道路上跑得快,更符合人类社会的真实环境。
梅花桩升级挑战赛是腾讯轮腿融合机器人灵敏运动技术的进一步突破依托团队自主研发的单目视觉惯性定位,全新的六维全方位运动实时规划,非线性轨迹优化,高精度模型预测控制等算法,实现更高精度的身体位置和姿态控制为了更好地完成跳跃和翻滚等高动态运动对机器人控制精度的挑战,团队通过结合离线最优跳跃轨迹规划和实时平衡运动轨迹规划,开发了模型预测控制算法
同时,腾讯机器人X实验室也在利用深度强化学习等AI技术推动机器人智能研究,让机器人在虚拟环境中自主学习,更好地适应复杂环境的变化与工业机器人提前设计好规则后做重复性任务不同,腾讯RoboticsX实验室更注重机器人自主特性的研究,目的是实现机器人在具有极大不确定性的动态环境中自主判断,决策和完成任务
根据实验室研究人员的说法,基于深度强化学习和sim2real等技术,Max可以在几个小时内学会自然灵活地行走作为腾讯机器人X实验室开发的多模态四足机器人移动技术平台,Max的相关新技术和算法同时具有良好的移动性,因此可以为实验室开发其他类型的移动机器人,适应潜在应用场景的沉淀技术和经验
郑重声明:此文内容为本网站转载企业宣传资讯,目的在于传播更多信息,与本站立场无关。仅供读者参考,并请自行核实相关内容。
责任编辑:子墨
最新阅读
-
![百岁山与天津马拉松一起开跑,激发体育热爱]()
百岁山与天津马拉松一起开跑,激发体育热爱
逐梦天津,奔赴健康之旅,2023天津马拉松已于10月15日正式开跑。此次大赛全程42.195公里,设马拉松、半程马拉松、健康跑三个项目,共吸引了来自29个国家和地区,近9万人报名。其中年龄最大的选手出...
2023-10-15 22:03 -
![巨量引擎“抖「营」全收” 开启全渠道联合经营的新时代]()
巨量引擎“抖「营」全收” 开启全渠道联合经营的新时
企业对于实现确定性增长与ROI提升的诉求愈加强烈,全渠道增长成为越来越多的企业的关注焦点。如何帮助企业建立全局视角,为全局ROI提升和生意增长创造增量?近日,在第十六届金投赏国际创意节的“全域增长”论...
2023-10-11 18:13 -
-
![成绩单“耀眼”!中秋国庆武隆接待游客141.92万人次]()
成绩单“耀眼”!中秋国庆武隆接待游客141.92万
今年国庆期间,武隆旅游人气超旺,各景区景点节日氛围浓厚,市民、游客出游热情高涨。据统计,今年中秋国庆期间武隆共接待游客141.92万人次,实现综合旅游收入45650.82万元,较2022年同期分别增长...
2023-10-08 18:20 -
![家电市场迎“金九银十” 品质家电更受年轻消费者青睐]()
家电市场迎“金九银十” 品质家电更受年轻消费者青睐
“金九银十”是家电消费旺季。在一系列促消费政策助推下,家电厂商抢抓机遇深挖潜力,中秋国庆假期家电市场销售明显升温。2023年是被商务部确定的“消费提振年”,有关部门出台政策措施促进电子产品消费、家居消...
2023-10-08 14:36 -
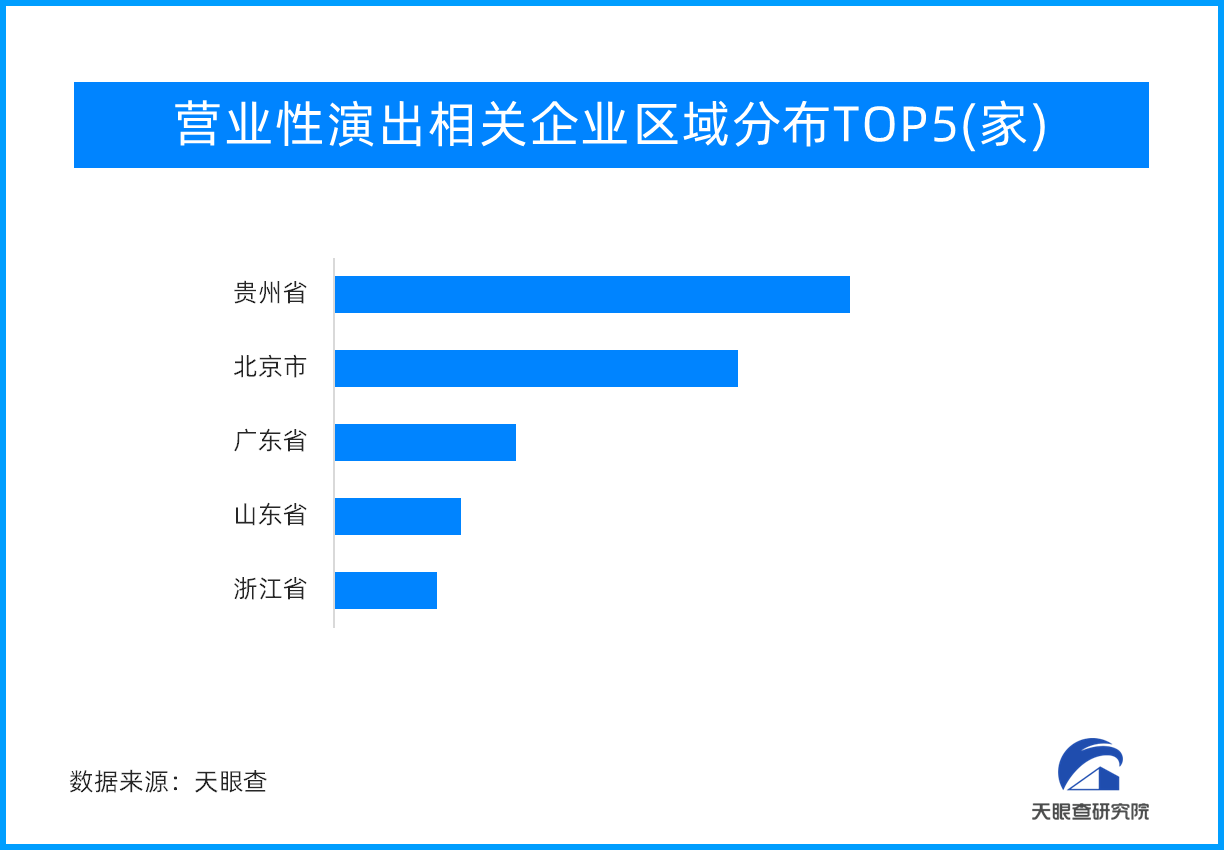
![旅游市场带“火”演艺市场 营业性演出超20亿元,同比增227.68%]()
旅游市场带“火”演艺市场 营业性演出超20亿元,同
近日,据中国演出行业协会监测数据显示,全国营业性演出44237场,与去年十一假期同比增227.68%,与2019年同比增长48.95%;票房收入20.05亿元,与去年同比增长322.14%,与2019...
2023-10-08 14:19 -
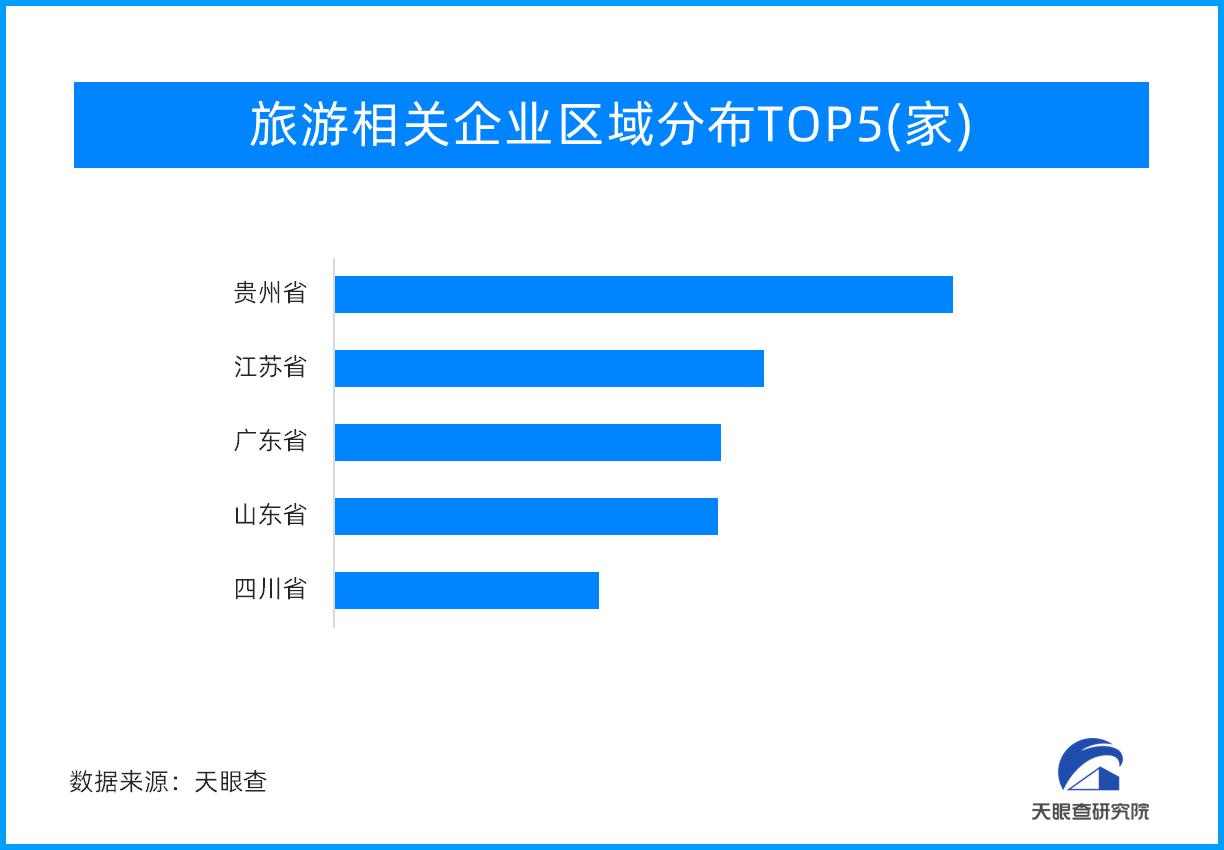
![旅游收入同比增长129.5%!中秋国庆“超级黄金周”再创佳绩]()
旅游收入同比增长129.5%!中秋国庆“超级黄金周
近日,文化和旅游部统计数据显示,2023年中秋节、国庆节假期,文化和旅游行业恢复势头强劲,全国假日市场平稳有序。经测算,国内旅游出游人数8.26亿人次,按可比口径同比增长71.3%,按可比口径较201...
2023-10-08 14:05 -
![数智赋能行业变革,见证企业超凡蜕变——爱采购明星企业大赛“了不起的改变”第二届郑州分会场成功举办]()
数智赋能行业变革,见证企业超凡蜕变——爱采购明星企
21世纪以来,科技领域迎来一轮轮颠覆性的变革——人工智能技术的次次迭代,信息化、智能化的汹涌浪潮,不断推动着中国制造企业持续向数智化阶段大步迈进,势不可挡。技术发展为各行各业持续积蓄着活力,有无数新兴...
2023-09-28 15:13 -
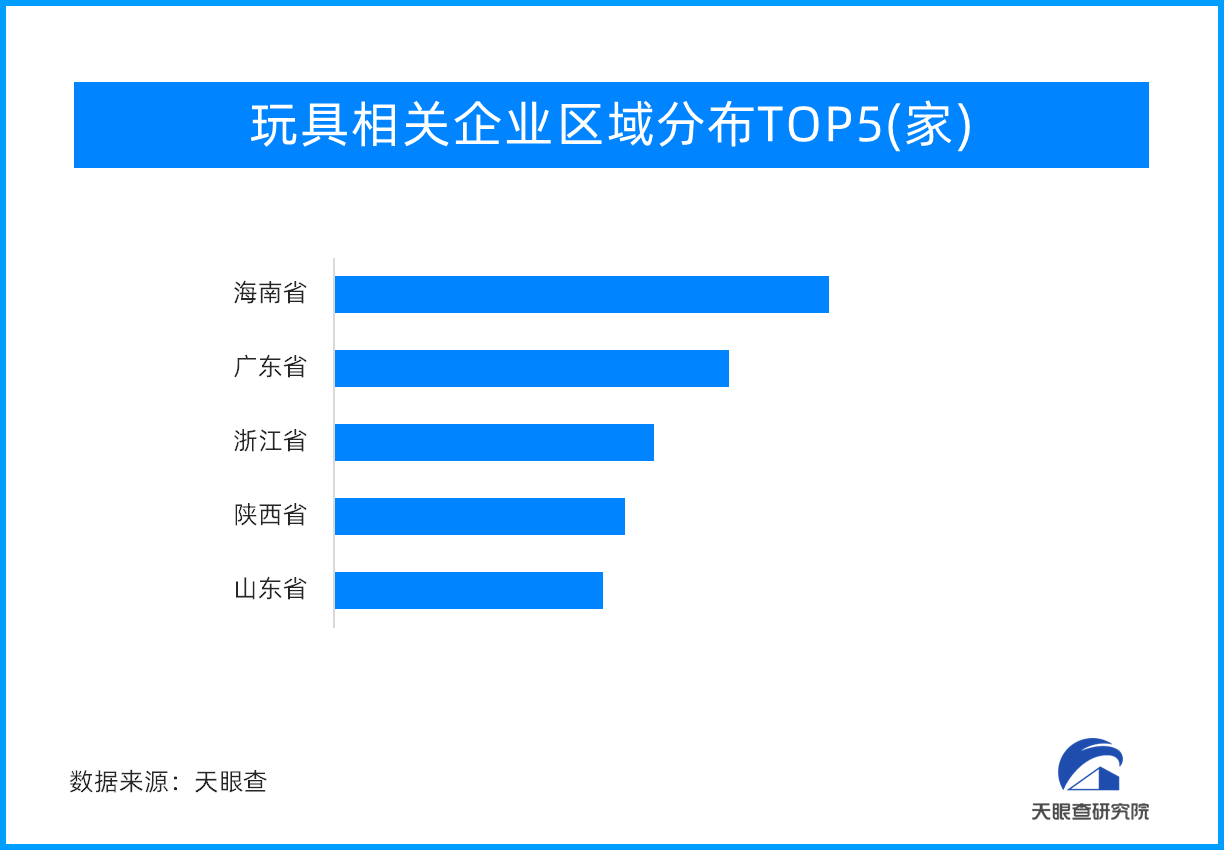
![天眼新知 — 益智玩具、毛绒玩具、潮流玩具…玩具市场迎多元化发展浪潮]()
天眼新知 — 益智玩具、毛绒玩具、潮流玩具…玩具市
玩具给儿童构建了一个美好的世界,不仅给孩子们带来快乐,同时给成年人启发,在残酷的生活中,让他们想起有关勇气、好奇心和对世界温柔相待。一、玩具产业:成长道路不可或缺的“玩伴”玩具产业是指以玩具产品为经营...
2023-09-27 17:41 -
![中国农资固始服务中心《农作物种植示范基地》举办首届现场观摩会]()
中国农资固始服务中心《农作物种植示范基地》举办首届
中国农民丰收节前夕,由中国农资固始服务中心举办的首届农作物种植示范基地现场观摩会,在河南省固始县洪埠乡倪岗村700亩示范田举行。据负责人杨跃柳介绍,此次举办的目的,是为贯彻中华全国供销总社第七届理事会...
2023-09-23 18:46